Rigid Origami Solver
A high-performance rigid-body solver for origami patterns: faces are treated as rigid plates connected by rotational hinges, and the system is solved as a constrained kinematic network rather than a mass-spring model.
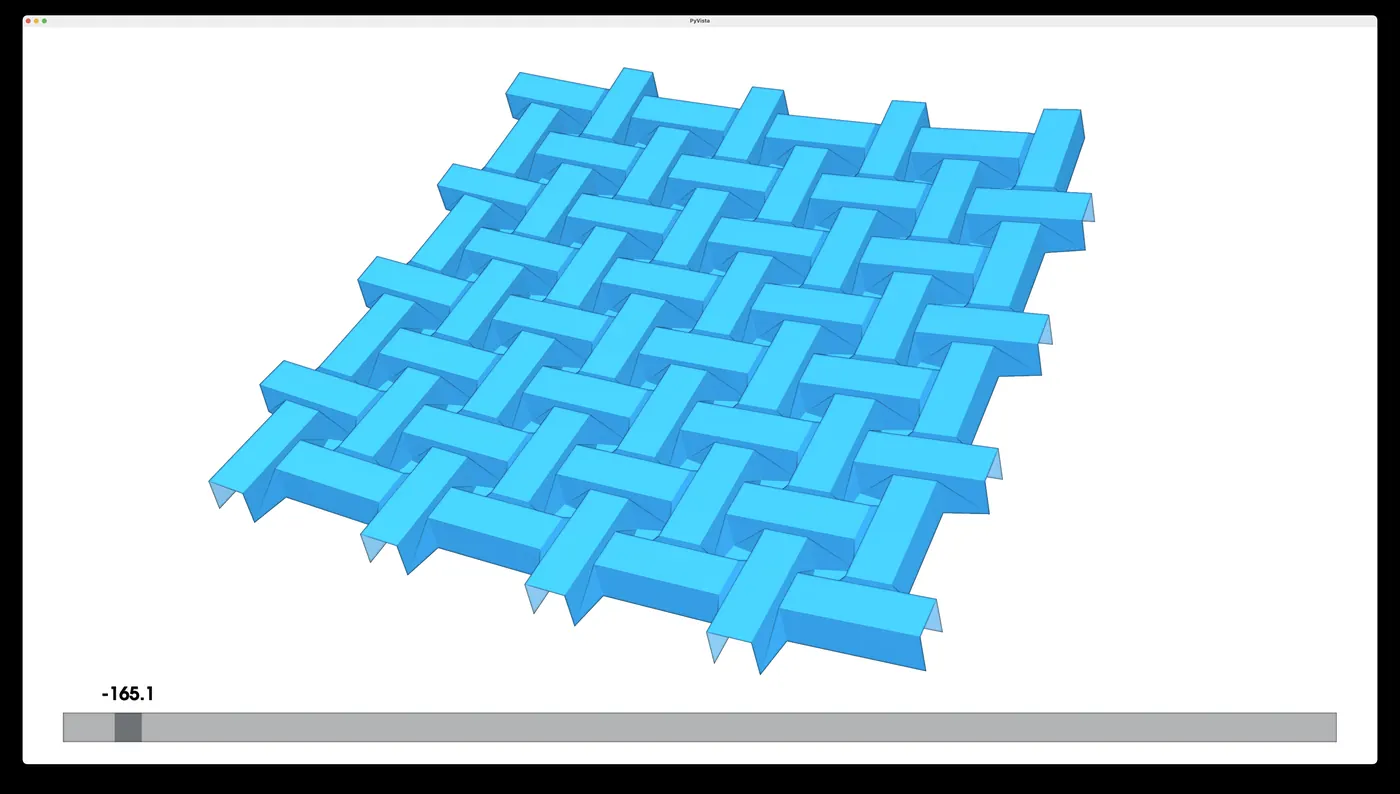
Simulated Huffman rectangular-weave pattern solved for geometric closure.
How it works
The state of the sheet is the vector of dihedral fold angles. For every internal vertex, the product of edge-frame rotations around that vertex must equal the identity — that's the rigid-foldability closure constraint.
Governing equations
For a vertex with incident edges:
Splitting fold angles into free unknowns and user-driven inputs , with static sector angles and connectivity as parameters, the constraints become a residual solved by root-finding.
Damped Newton with trust region
Plain Newton fails at the flat sheet: the configuration is singular, the Jacobian goes rank-deficient, and the solver flips between mountain and valley assignments (bifurcation). The solver instead uses a step-limited damping scheme that constrains each iteration to the local basin of attraction, preserving the mountain/valley pattern across frames.
The linear sub-problem is solved with scipy.sparse.linalg.lsmr, chosen over LSQR for monotonic convergence on the rank-deficient cases near bifurcation points.
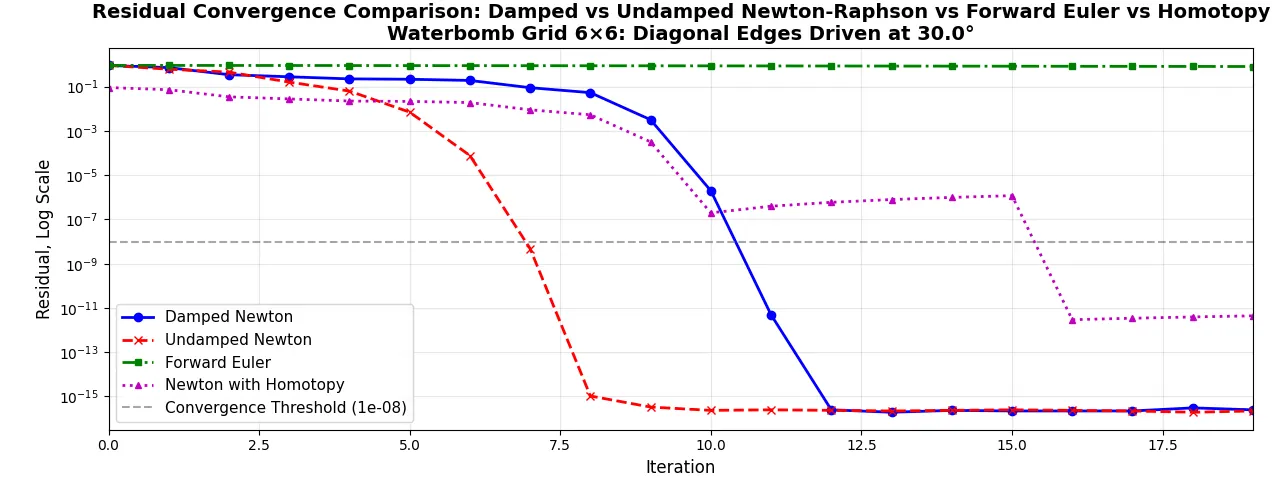
Forward Euler fails to converge; undamped Newton bifurcates; damped Newton stays in the local basin.
Sparse analytical Jacobian
Closure constraints are topologically local — each fold only affects vertices it touches — so the Jacobian is over 98% sparse on large grids. The solver:
- Computes analytical derivatives via the chain rule on (no finite differences).
- Assembles entries directly into pre-allocated flat COO arrays.
- Parallelizes assembly with Numba
prange, bypassing the GIL.
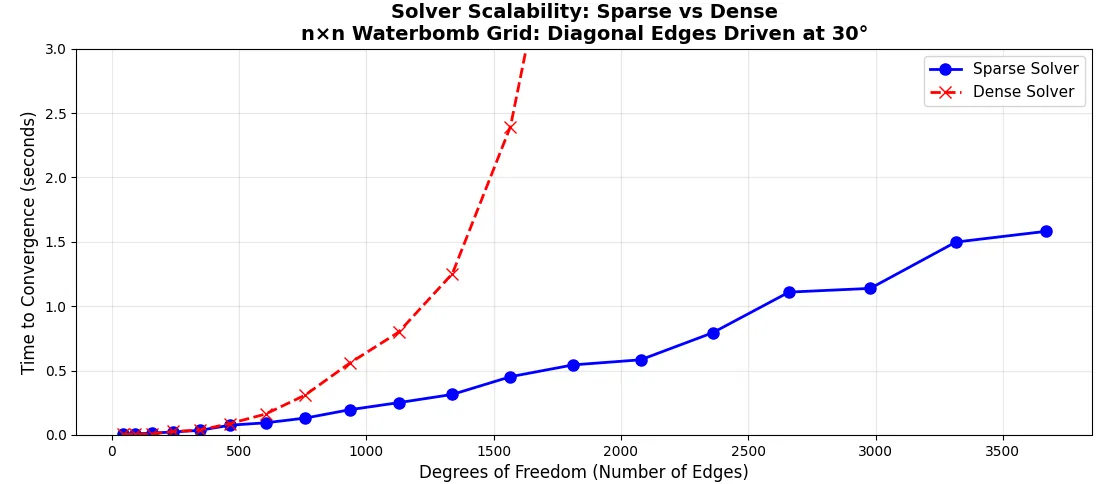
Beyond ~200 DOFs the dense solver hits an wall; the sparse solver scales empirically as ≈ and stays interactive on a 70×70 Miura grid.
Visualization
3D coordinates are reconstructed from fold angles in by a BFS over the face graph rooted at the center, propagating rigid transforms via Rodrigues' formula. PyVista handles the live rendering.
Patterns
The repository includes .fold files for:
birdBase.fold,flappingBird.fold— classical Miura-derived baseshuffmanWaterbomb.fold,huffmanRectangularWeave.fold,huffmanExdentedBoxes.fold— Huffman tessellations
Non-rigid patterns (e.g. flapping bird, which physically requires panel bending) correctly stagnate at a non-zero residual: no rigid configuration exists, and the solver reports it rather than producing spurious motion.
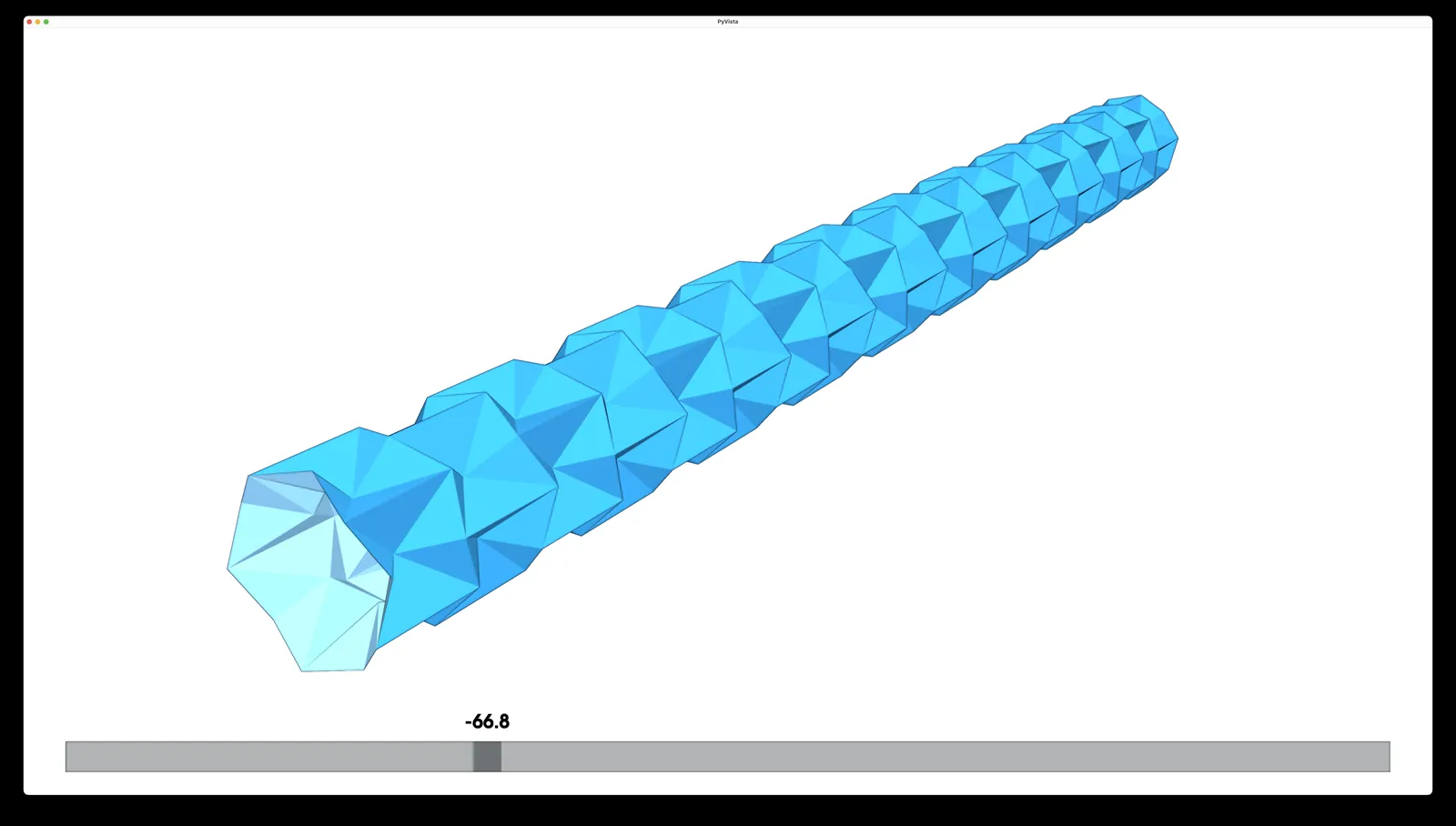
Additional results
Stack
- Python — NumPy, SciPy (
lsmr), Numba (JIT +prange) - PyVista — interactive 3D visualization
License
MIT — see LICENSE.